Recopiez et répondez aux questions suivantes sur votre feuille en testant les programmes ci-dessous :
1) Quelles valeurs mini et maxi lisez-vous dans la console lorsque vous déplacez le joystick sur l'axe X ?
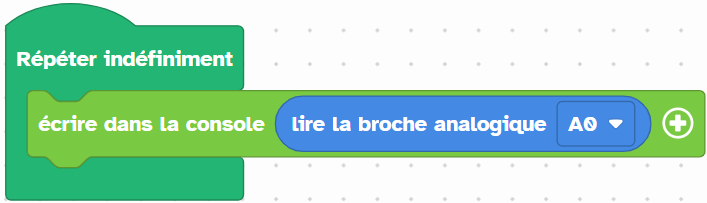
2) Quelles valeurs mini et maxi lisez-vous dans la console lorsque vous déplacez le joystick sur l'axe X ?
3) Comment modifier ce programme pour afficher les valeurs de l'axe Y ?

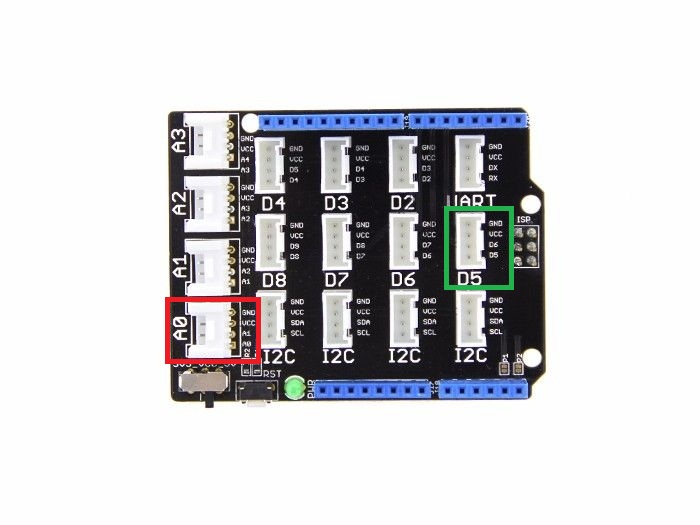
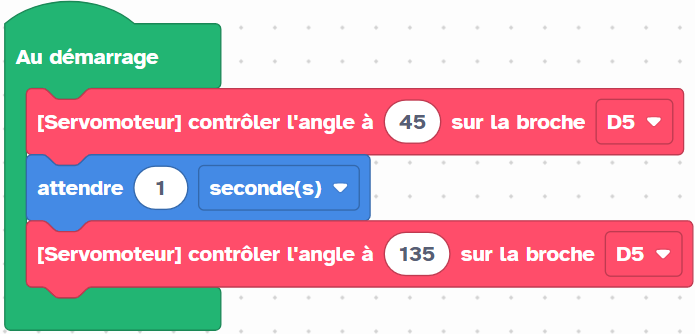
4) Qu'observez-vous sur le bras robot ?
5) Qu'observez-vous lorsque vous remplacez la broche D5 par D6 ?
Réalisez le programme d'après l'algorithme suivant :
- Répéter
- Stocker les valeurs mesurées sur les axes X et Y dans des variables.
- Positionner l'angle de chaque servomoteur en fonction des valeurs X et Y.
Cliquez ici pour accéder à l'interface de programmation Vittascience