Afin de piloter un bras-robot, nous souhaitons utiliser une interface gestuelle, c'est-à-dire que les mouvements de la main de l'opérateur seront reproduits par le bras-robot.
Afin de piloter un bras-robot, nous souhaitons utiliser une interface gestuelle, c'est-à-dire que les mouvements de la main de l'opérateur seront reproduits par le bras-robot.
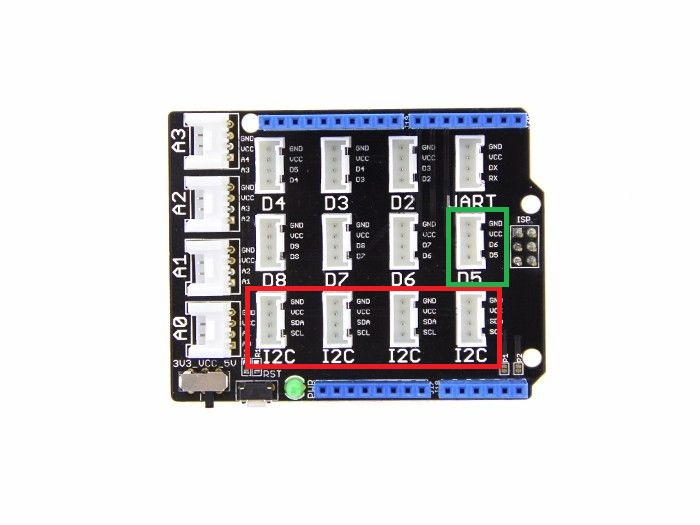
Le capteur de gestes est connecté sur un port I2C, le servomoteur longitude sur le port D5 et le servomoteur latitude sur le port D6.
Recopiez et répondez aux questions suivantes sur votre feuille en testant les programmes ci-dessous :
1) Quelle valeur lisez-vous dans la console lorsque vous passez la main devant le capteur ?
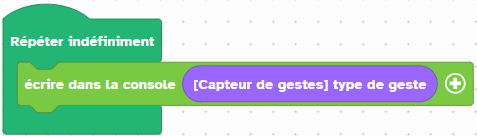
2) Qu'observez-vous dans la console ?
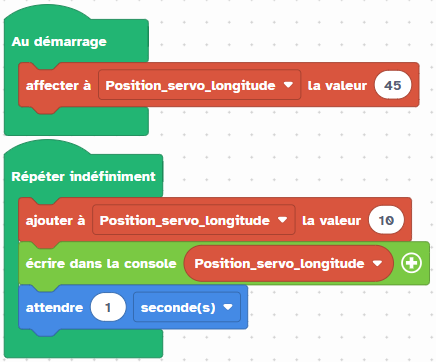
Réalisez le programme d'après l'algorithme suivant :
À ajouter ensuite : lorsque l'on approche la main du capteur, les positions des servomoteurs reviennent à 90°.
Cliquez ici pour accéder à l'interface de programmation Vittascience
Lorsque vous avez terminé, demandez le code du quiz de validation au professeur.
Régi par la licence Creative Commons: Licence d'attribution en partage identique 4.0
